【转】ARM学习篇 中断定时理解
0赞1. 中断控制器
a. 中断处理流程
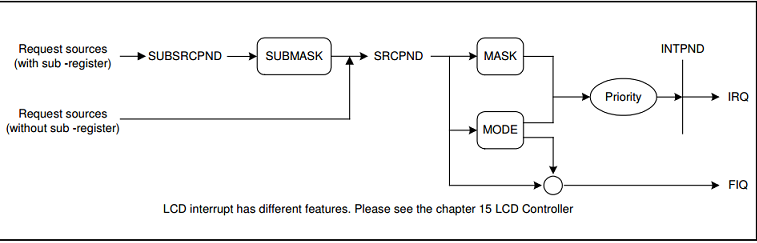
P1--摘自S3C2440A手册
P1简要阐述了S3C2440A内置中断控制器处理中断的流程:
●若某中断有自中断,则先接收子中断请求,否则,直接接受源中断。
●中断控制逻辑根据INTMSK,屏蔽对应位的中断;根据INTMOD确定对应位中断模式(FIQ或者IRQ)。
●中断仲裁器根据PRIORITY,确定仲裁规则并仲裁出最高优先级;同时,INTPND对应中断位置为1,只要CPSR的I位或者F位使能,就执行相应中断。
b. 中断向量表
当ARM920T内核发生异常时,就会自动转到相应的地址,并自动记录跳转前PC的值(存入LR)和状态(存入SPSR)
P2--中断向量表
一般我们在中断向量表相应位置写入相关跳转指令,可以是
LDR PC,=FLAG;B FLAG注意这两个指令所能接受的地址的范围即可
c. 中断控制器的特殊功能寄存器
●源挂起寄存器:32位,每一位均与一个中断源连接;当中断源产生中断请求时并等待中断服务程序执行时,其相应位为1;其每一位均自动设置(若有某中断请求,则相应位设为1),不受中断屏蔽寄存器影响;中断服务程序执行完后,其相应位应该清0(只需写入一个对应位有1的数字,例如,清除第二位对应中断,给其写入0x2即可)。
●中断模式寄存器:32位,每一位均与一个中断源对应;某位为1,则对应中断为FIQ,否则,为IRQ(某一时刻只能有一位被设为1)。
●中断屏蔽寄存器:32位,每一位均与一个中断源对应;某位为1,则对应中断被屏蔽,否则,正常执行。
●优先寄存器:32位,提供了多种冲裁规则
●中断挂起寄存器:32位,每一位均与一个中断源对应;某位为1,则表示该位对应中断源拥有最高优先级。
●中断偏移寄存器:32位,其大小对应当前被处理的中断源。
d. 详细寄存器介绍,请看S3C2440A手册
2. PWM
a. PWM脉冲宽度调制大致结构
●定时器0和1与一个8位预分频器相连,定时器2,3,4则与另外一个预分频器相连;每个定时器都有一个时钟分频器,可以根据TCFG0和TCFG1的值调节定时器输入频率;
定时器输入频率=PCLK/(预分频值+1)/分割值
预分频值=0~255
分割值=2,4,8,16
●定时器4没有输出引脚,可以单纯的作为定时器。
b. 定时器操作步骤
●设置TCNTBn和TCMPBn,将手动更新位设为1,假设不配置逆变器(即逆变器位设为0)
●设置TCFG0和TCFG1,即调节定时器的输入频率
●配置自动重载位(即自动重载位设为1),启动定时器(即启动位设为1)
c. 输出电平控制
●逆变器关时,若TCNTn<=TCMPn,输出为高,若TCNTn>TCMPn,输出为低;逆变器开时,与前者相反。
d. 死区发生器介绍,详见S3C2440A手册
3. 学习了这么多,终于可以开始写代码
注意:本人喜欢从根本上理解事物,故而,以下代码运行在裸机上,不依赖任何已有库,纯汇编;以下代码在keil uvison 5下编译通过。
AREA TIMER,CODE,READONLY
ENTRY
CODE32
GPFCON EQU 0x56000050
GPFDAT EQU 0x56000054
GPFUP EQU 0x56000058
GPBDAT EQU 0X56000014
GPBCON EQU 0x56000010
GPBUP EQU 0x56000018
SRCPND EQU 0X4A000000
INTMOD EQU 0X4A000004
INTMSK EQU 0X4A000008
PRIORITY EQU 0x4A00000C
INTPND EQU 0X4A000010
INTOFFSET EQU 0X4A000014
WTCON EQU 0X53000000
TCFG0 EQU 0x51000000
TCFG1 EQU 0x51000004
TCON EQU 0x51000008
TCNTB0 EQU 0x5100000C
TCMPB0 EQU 0x51000010
TCNTO0 EQU 0x51000014
_ENTRY
B RESET;0X0
B .;0X4
B .;0X8
B .;0xc
B .;0x10
B .;0x14
B HANDLEIRQ ;0x18中断入口
B .
RESET
LDR R0,=WTCON
LDR R1,=0
STR R1,[R0]
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;关闭看门狗,否则无限重启
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
MSR CPSR_c,#0Xd2
LDR SP,=3000
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;设置中断服务的堆栈指针
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
MSR CPSR_c,#0xdf
BL INIT_LED
BL INIT_IRQ
BL INIT_TIMER
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;初始化相关寄存器
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
MSR CPSR_c,#0X5F
LDR PC,=MAIN
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;初始化完成,转到主程序
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
INIT_LED
LDR R0,=GPFCON
LDR R1,=0X5555
STR R1,[R0]
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;初始化GPF端口属性,具体电路可以看我的前一篇博文
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
LDR R0,=GPFUP
LDR R1,=0XFF
STR R1,[R0]
LDR R0,=GPFDAT
LDR R1,=0XFF
STR R1,[R0]
LDR R2,=0
MOV PC,LR
INIT_IRQ
LDR R0,=INTMOD
LDR R1,=0X0
STR R1,[R0]
;简单起见,全设为IRQ模式
LDR R0,=PRIORITY
LDR R1,=0X7F
STR R1,[R0]
;设置中断仲裁规则
LDR R0,=INTMSK
LDR R1,=0xFFFFFBFF
STR R1,[R0]
;屏蔽掉无关中断
MOV PC ,LR
INIT_TIMER
LDR R0,=GPBUP
LDR R1,=0X7FF
STR R1,[R0]
LDR R0,=GPBCON
LDR R1,=0X2
STR R1,[R0]
;把GPB.0端口配置为TOUT0输出,我的板子是连接的LCD背光灯
LDR R0,=TCFG0
LDR R1,=119
STR R1,[R0]
LDR R0,=TCFG1
LDR R1,=0X3
STR R1,[R0]
;设置定时器输入频率
LDR R0,=TCNTB0
LDR R1,=6250
STR R1,[R0]
LDR R0,=TCMPB0
LDR R1,=6000
STR R1,[R0]
;设置定时器多久产生中断
LDR R0,=TCON
LDR R1,=0X2
STR R1,[R0]
;设置手动更新TCNT0和TCMP0
LDR R0,=TCON
LDR R1,=0Xd
STR R1,[R0]
;启动定时器
MOV PC,LR
HANDLEIRQ;中断服务程序入口
SUB LR,LR,#4
STMDB SP!,{R0-R12,LR}
LDR LR,=INT_RETURN
LDR PC,=EINT_HANDLE
INT_RETURN
LDMIA SP!,{R0-R12,PC}^
EINT_HANDLE
LOOP
SWITCH
LDR R0,=GPFDAT
LDR R1,[R0]
CASE_111
CMP R1,#0XFF
BNE CASE_110
LDR R1,=0X6F
STR R1,[R0]
B SWITCH_END
CASE_110
CMP R1,#0X6F
BNE CASE_101
LDR R1,=0X5F
STR R1,[R0]
B SWITCH_END
CASE_101
CMP R1,#0X5F
BNE CASE_011
LDR R1,=0X3F
STR R1,[R0]
B SWITCH_END
CASE_011
CMP R1,#0X3F
BNE SWITCH_END
LDR R1,=0X6F
STR R1,[R0]
B SWITCH_END
SWITCH_END
LDR R4,=SRCPND
LDR R5,=0XFFF
STR R5,[R4]
LDR R4,=INTPND
LDR R5,=0XFFF
STR R5,[R4]
MOV PC,LR
MAIN
B MAIN
END
主要注意先设置手动更新位,再启动定时器

