【PSoC4】UART中断接收
0赞从零开始学PSOC4
1 如何查找API函数说明?
在SCB_P4_v1_0就是啦。看来赛普拉斯想的太周到了,真是站在工程师的角度想问题。
2 如何操作UART的API函数?
以前使用过PSOC3,但是这次还是忘记了把UART要换成UART component的名字了。
即在调用时:void UART_Start(void)
改为:void UART_1_ Start (void)
第一节 UART中断接收
PSOC4的UART模块特性:
带有硬件地址检测功能的 9 位寻址模式
波特率范围从110 到 921600 bps ,也可任意高达 4 Mbps
RX 和 TX 缓冲区大小范围有4字节 到 65535字节
帧检测、奇偶校验检测和溢出检测
可优化的硬件选择,全双工、半双工、仅发送TX,和仅接收 RX
按位 3 取 2 表决
中断信号产生和检测
8倍(8x) 或 16倍(16x) 过采样
UART原理图:
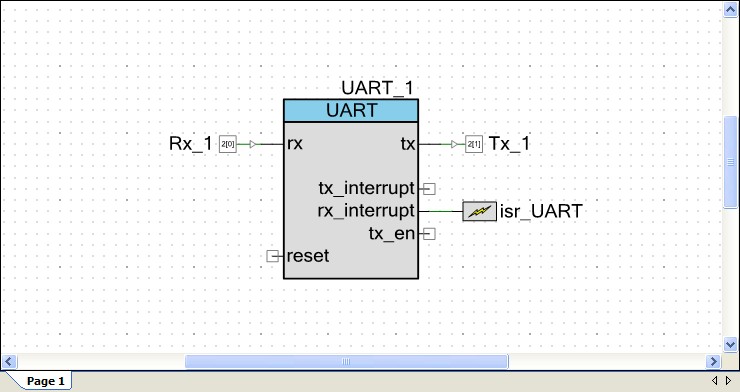
从原理图中可以看出
RX_1引脚:P2[0]
TX_1引脚:P2[1]
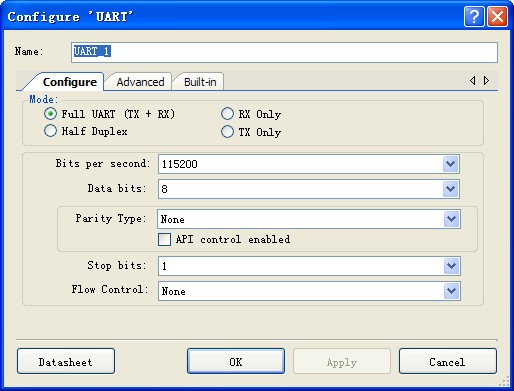
配置UART_1模块的方法是
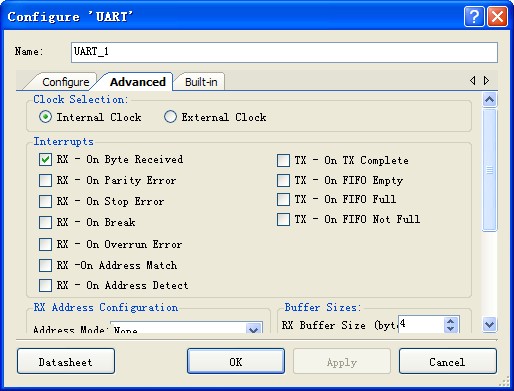
特别说明:RX缓冲区大小(字节)
此参数定义分配给 RX 缓冲区的 RAM 字节数。数据从接收寄存器移至该缓冲区。
当所选的缓冲区大小是 4 字节时,硬件 FIFO 的四个字节将用作缓冲区。缓冲区大小超过 4 字节时,需要使用中断将数据从接收 FIFO 移动至此缓冲区。UART_GetChar() 或 UART_ReadRXData() API函数在不需要对顶层固件进行任何更改的条件下,可以从正确数据源获取正确数据。
当 RX 缓冲区大小超过 4 字节时,Internal RX Interrupt ISR(内部 RX 中断 ISR) 将自动启用,并且 RX – On Byte Received(RX – 接收字节)中断源被选中并禁用,因为它会导致错误的处理功能。
然后添加isr_UART
方法是在右侧的Component Catalog中System->Interrupt[V1.70]
isr_UART的配置方法如图
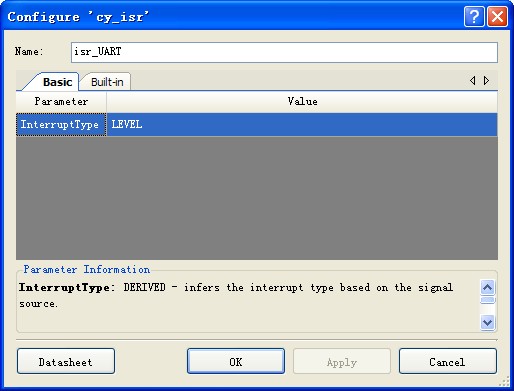
仅为基于UDB 的模块(如UART 和SPI)生成的中断选择LEVEL选项。其原因是这些模块通过生成一个电平中断来表示UDB FIFO 缓冲区的状态信号。深度为4 个字节的FIFO 缓冲区用于暂时存储传输(Tx FIFO)或接收的数据(Rx FIFO)。
对于Rx FIFO,只要存在最少一个数据字节可供CPU 读取,FIFO 状态信号便为高电平。如果选中了DERIVED 或RISING_EDGE 选项,即使缓冲区内有多个字节,该中断也只会触发一次。如果编写ISR 代码仅在每次中断时读取一个字节,那么缓冲区内的额外数据将有可能丢失。
接下来看一下DWR,进行引脚配置、中断优先级和时钟配置。
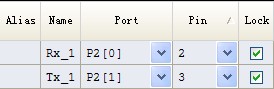
在Port选项中直接选取任意的引脚来作为Rx_1使用,本文选用P2[0];
同样选取任意的引脚来作为Tx_1使用,本文选用P2[1];
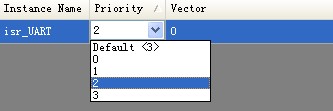
在优先级配置里,默认是<3>,也可以进入中断。
当然,0的优先级是最高的。
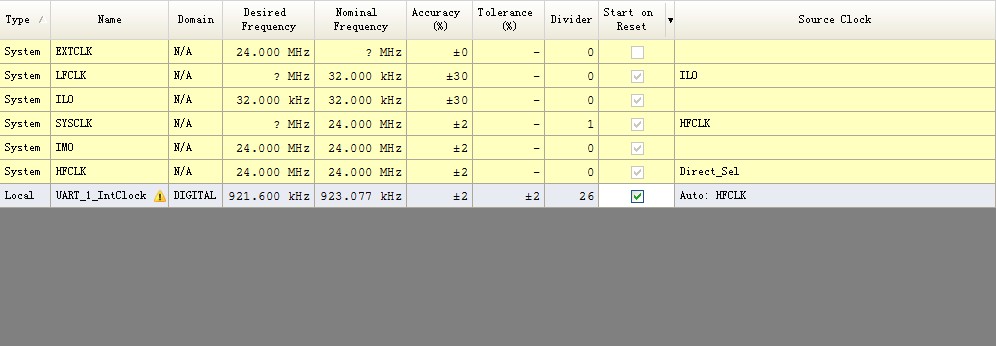
时钟配置:这里使用的是内部24M时钟,双击System是可以修改频率的,
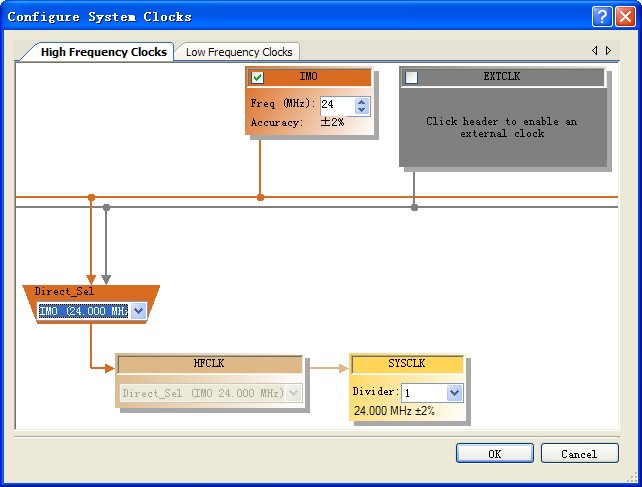
Direct_Sel:可以选择使用内部或是外部时钟。
SYSCLK:可以进行1,2,4,8,16,32,64,128分频。
IMO:可以调节4~48MHz之间的任意整数频率值。
源程序:
void main()
{
/* Place your initialization/startup code here (e.g. MyInst_Start()) */
UART_1_Start();
isr_UART_Start();
UART_1_PutString("UART is OK\r\n");
/* Enable global interrupts */
CyGlobalIntEnable;
for(;;)
{
}
}
中断服务程序:位置在Generated Source下面的isr_UART.c第138行。
CY_ISR(isr_UART_Interrupt)
{
/* Place your Interrupt code here. */
/* `#START isr_UART_Interrupt` */
if(UART_1_ReadRxData()=='1')
{
UART_1_PutString("RX_Interrupt is Right\r\n");
}
/* `#END` */
}
演示效果图:


