第九届研电赛特等奖获得者追梦队答记者问(1)
0赞1、你们的电路框图是怎样的?采用哪家公司的片子?
人员自主定位系统由两部分组成,分别为鞋载传感器节点与臂载数据处理节点,如图1(a)所示。数据处理节点如图1(b)所示,主体为基于ARM处理器的嵌入式模块,主要用于解算鞋尖测得的运动数据与轨迹修正。同时,处理节点还包括一些辅助模块,如电源管理模块,无线传输模块等。处理节点使用433MHz无线传输模块实时将定位结果发送至远程的主控中心,若主控中心电脑在建筑物外,则可以可靠接收建筑物内20楼传来的定位结果。图2为人员自主定位系统应用于消防的设想图,消防员佩带的传感器节点将运动数据传给臂载处理器节点,处理器节点经解算后获得的位置信息通过无线链路发送到建筑外指控中心,指控中心获得消防员实时位置信息,指挥消防员的行动。
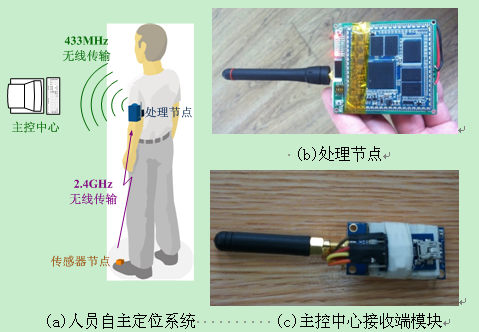
图1. 传感器节点
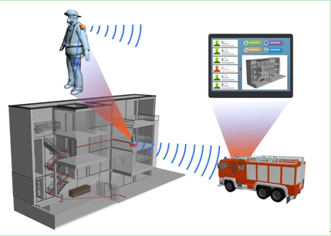
图2. 消防应用设想图
我们基于以下原则设计传感器节点:
(1) 尽量利用开源资源来缩短开发周期,使其适用性更广,并且提高系统的稳定性;
(2) 控制传感器节点的整体成本,不使用昂贵的高端惯性测量单元;
(3) 考虑到实际应用中的情况,传感器节点应具备充电,无线传输等功能,而且对节点的大小、重量、功耗有特定要求。
由于Arduino平台的易用性和活跃的社区支持,我们选择此平台开发传感器节点,包括Arduino编程语言、开发环境、以及相应的库函数,微处理器选择预装Arduinobootloader的ATmega328P芯片。在应用中,我们发现数据处理算法中的系统误差对定位结果的影响远大于惯性传感单元的器件误差的影响,因此没有选择特别昂贵的高端惯性传感单元,而是选择了InvenSense MPU-9150芯片,此芯片包含3自由度的加速度计与3自由度的陀螺仪,且在Arduino平台下已经被广泛使用。气压高度计与MPU-9150共用内部集成的I2C总线。主机可通过一个Micro USB接口对传感器节点进行程序烧写与调试,此接口也可用于充电。
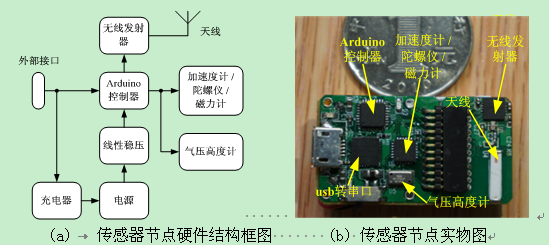
图3. 传感器节点
传感器节点在工作中不断地以较高速率传输测量得到的加速度与角速度数据,因而无线传输占用了大部分的电量。为了使传感器节点连续工作时间更长,要慎重考虑无线传输的功耗问题。蓝牙2.0或4.0芯片的工作电流大约为20mA,而我们在最终的系统中选择功耗更低的2.4GHz的24L01无线收发器,工作电流可以降低到8mA。此收发器的传输距离大于5米,可以将数据从足部传输到手持的处理节点。
2、两个节点能合二为一吗?
两个节点合二为一是我们的一个努力方向,但是目前很难做到。原因如下:
鞋尖运动数据处理计算量较大,Arduino处理器很难做到实时处理,需要更强大的处理器,因此占用的体积也更大;
位置坐标结果需要发送至远端的指挥中心,因此对发送的功率和天线有更高的要求,需要容量更大的电池,对体积也提出了要求;
总的来说,目前由于体积的原因,将传感器节点与处理节点合二为一都放在鞋尖,会影响人的正常行走,限制了应用。
3、算法方面的工作能做一些介绍吗?
算法方面,提出了结合建筑物先验知识、人的行走模型和环境信息辅助的独创性算法。目前该系统已经完成原理样机研制,不存在任何技术瓶颈和研制风险,正在进行产品的工程化设计。在实际写字楼环境行走15分钟,定位误差小于2米,性能指标达到国际领先水平。
4、你们各自未来打算和规划是什么?
由于该技术的创新性与实用性,受到了国内重要媒体的广泛报道,中央电视台新闻联播、新闻频道、军事频道、湖南卫视、湖南教育台、长沙晚报、中国科学报、新华网、新浪网、湖南红网等都对该技术进行了报道,多家研究机构与厂商表达了深入合作的意向。我们打算乘着东风,将该技术更好地实现工程化,使之更加贴近实际的应用。

