三相电压SSPLmatlab仿真
0赞
发表于 6/18/2013 4:31:16 PM
阅读(3949)
双同步坐标系解耦软件锁相环是考虑电网电压负序分量对传统软件锁相环的影响而提出的算法[12-13],它包括两个旋转坐标系,其中dq+1 坐标系以ω角速度逆时针旋转,其角度设为θ,而dq−1 坐标系是以−ω 的角速度顺时针旋转,其角度设为−θ。该锁相环输出电压的矢量图如图1(b)所示,其中1s U + 为电压的正序分量, 1s U − 为电压负序分量,他们分别以ω 角速度逆时针和顺时针旋转,该锁相环同时对这两个序分量进行坐标变换,将其分解成正序和负序dq 坐标系下的分量,并通过解耦网络和滤波环节,实现电压频率、相位和幅值的检测。
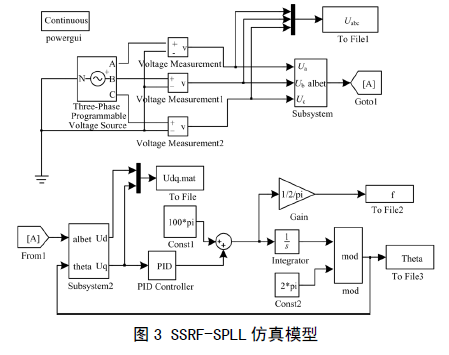
SSRF 锁相环控制原理如图2 所示,三相电压通过坐标变换,获得sd u 和sq u ,若三相电压对称,则在频率和相位完全锁定的情况下即当θ=θ 时,sd u = 2U 为电网电压的幅值, sq u =0,所以通过PID 调节器把sq u 调节为零就可以实现锁相的目的。利用Matlab/Simulink 搭建的SSRF-PLL 仿真模型如图3 所示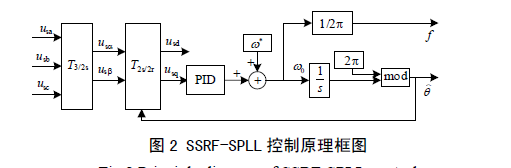
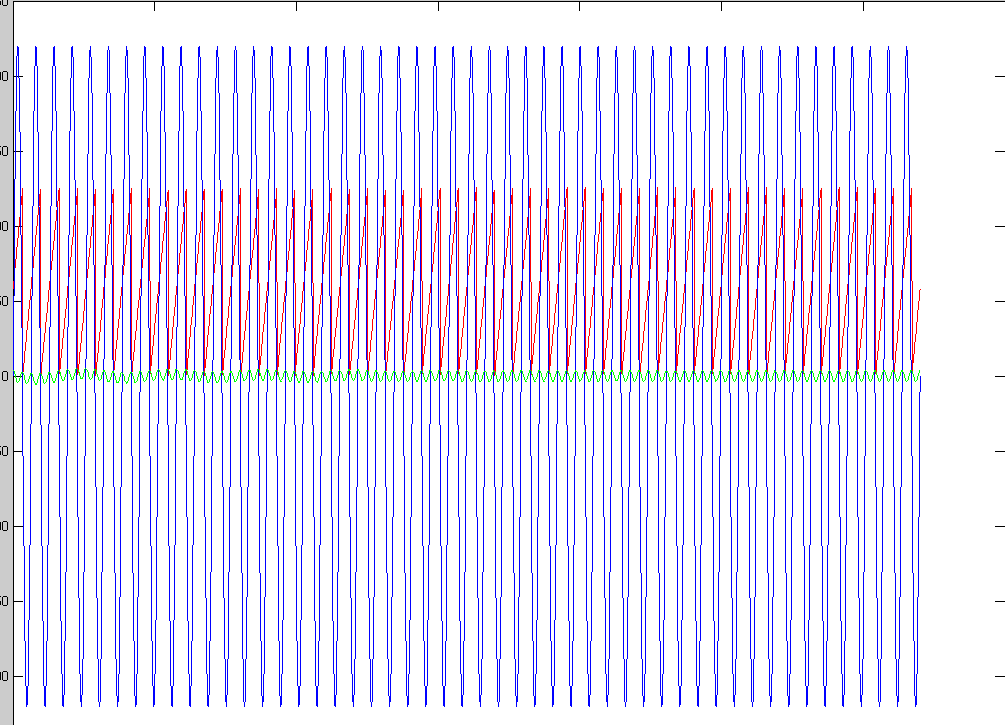
matlab仿真波形: