沙龙笔记——电动汽车CAN总线干扰
0赞
发表于 2015/6/14 下午7:15:27
阅读(4903)
沙龙听完黄总对于CAN的介绍以及他们遇到电动汽车上的CAN问题,我其实有点诧异。致远电子,其实无可厚非,如同Vector那样,你做深了做好了,把诊断CAN的设备做的符合国情,这是中国技术进步过程中给予小公司的最大的机会,都是一步一个台阶做起来的。问题在哪里?
1)电气化商用车,或者说客车本身应该处在工程样车阶段,但已然进入了部署和实施阶段
黄总很有趣,把问题分析的很透彻,比如他遇到的问题表面是司机一踩油门踏板,仪表盘上的各种现实变慢了,其实质是:
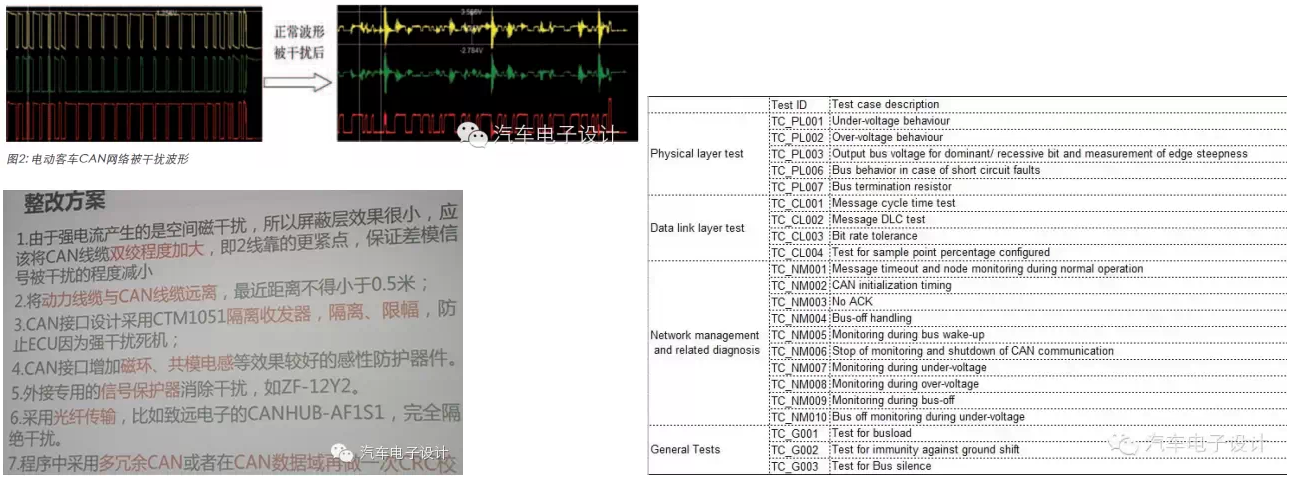
仪表盘现实异常<= 仪表接受CAN消息错误帧过多,使得发送数据 <= CAN总线干扰,波形强干扰 <= 线束布置不合理,动力线屏蔽未做好,使得CAN线和动力线干扰耦合
黄总给了一些方案,都是在部件和布置层面的办法,干扰犹在。
所以这事情就变得很有趣了,倒是致远给整车企业提了一些总线方面的测试
* 位宽度容忍测试(波特率波动)
* 报文压力测试(大数据量负载情况)
* 错误波特率压力测试(错误波特率)
* 抗干扰能力测试(在高强度干扰)
* 总线短路测试
* 总线断路测试
* 容抗增加压力测试(适应的容抗最高值)
* 总线网络阻抗测试(适应的阻抗最高值)
* 对正负电源或地短路(对正负电源或者地短路)
* 终端电阻变化压力测试等(终端电阻范围)
可是这些不应该是整车企业自己提出更多,如同封面那张图那样,早干嘛去了?
能看到的是这些,我们细细思量一下,如果BMS VCU和电机控制器之间的通信受到干扰,这车怎么控制?
说到充电这块,GBT27930+GB20234.3,特别是看到以下的内容:
1)监控测试模式:监控测试启动后,界面中为四个充电过程的流程监控图,实时闪动目前进行的步骤。如果发生充电过程异常中断,可以自动提示目前中断的位置,便于查找问题原因。
2)模拟充电机对BMS仿真测试模式:对被测的电动汽车BMS系统进行协议一致性测试。用户需要先填入需要模拟的充电机的参数,比如目标地址、源地址、充电机编号、最高/最低输出电压、最大输出电流、电压/电流输出值、累计充电时间等等参数。然后勾选要仿真的充电过程,点击开始即可开始测试。
3)模拟BMS对充电机测试模式:在用户需要先填入需要模拟仿真的BMS系统的参数,比如目标地址、源地址、电池类型、整车动力电池额定容量、额定电压、单体电池最高充电电压、最高允许充电电流、标称总能量、最高允许充电总电压、最高允许充电温度、电压需求、电流需求、充电模式等。然后勾选要仿真的充电过程,点击开始即可开始测试。
4)物理链路层可靠性测试:我们发现由于充电过程中伴随有强电磁场的干扰,对CAN总线通信的物理层有很大的影响,有被测设备因为没有具备良好的电磁兼容能力,而导致充电中断的现象。所以本测试认证加入了对物理链路层的可靠性测试
处在公共区域的事情,确实面临着太多的问题。其实一直以来GB/T对隐私的问题是没有任何考虑的,收集了很多的信息,缺乏保护;协议本身也是逐渐完善,好多问题没有考虑。如果故障发生,CAN能工作时还好,各种故障处理机制带来的安全性问题,也需要逐步完善。
急着赶路,都把事情干成,把产品做出来,但是里面有那么多的错误帧,有那么多的问题,上了车再去查既费力,而且问题是查不完的。不同系统之间的问题,你把各种Noise变量加进去,可以得到一个很复杂的P-图。问题是改不完,真要改的完,要系统设计干嘛呢,要工程细节设计干嘛呢,要失效分析干嘛呢?
1)电气化商用车,或者说客车本身应该处在工程样车阶段,但已然进入了部署和实施阶段
黄总很有趣,把问题分析的很透彻,比如他遇到的问题表面是司机一踩油门踏板,仪表盘上的各种现实变慢了,其实质是:
仪表盘现实异常<= 仪表接受CAN消息错误帧过多,使得发送数据 <= CAN总线干扰,波形强干扰 <= 线束布置不合理,动力线屏蔽未做好,使得CAN线和动力线干扰耦合
黄总给了一些方案,都是在部件和布置层面的办法,干扰犹在。
所以这事情就变得很有趣了,倒是致远给整车企业提了一些总线方面的测试
* 位宽度容忍测试(波特率波动)
* 报文压力测试(大数据量负载情况)
* 错误波特率压力测试(错误波特率)
* 抗干扰能力测试(在高强度干扰)
* 总线短路测试
* 总线断路测试
* 容抗增加压力测试(适应的容抗最高值)
* 总线网络阻抗测试(适应的阻抗最高值)
* 对正负电源或地短路(对正负电源或者地短路)
* 终端电阻变化压力测试等(终端电阻范围)
可是这些不应该是整车企业自己提出更多,如同封面那张图那样,早干嘛去了?
能看到的是这些,我们细细思量一下,如果BMS VCU和电机控制器之间的通信受到干扰,这车怎么控制?
说到充电这块,GBT27930+GB20234.3,特别是看到以下的内容:
1)监控测试模式:监控测试启动后,界面中为四个充电过程的流程监控图,实时闪动目前进行的步骤。如果发生充电过程异常中断,可以自动提示目前中断的位置,便于查找问题原因。
2)模拟充电机对BMS仿真测试模式:对被测的电动汽车BMS系统进行协议一致性测试。用户需要先填入需要模拟的充电机的参数,比如目标地址、源地址、充电机编号、最高/最低输出电压、最大输出电流、电压/电流输出值、累计充电时间等等参数。然后勾选要仿真的充电过程,点击开始即可开始测试。
3)模拟BMS对充电机测试模式:在用户需要先填入需要模拟仿真的BMS系统的参数,比如目标地址、源地址、电池类型、整车动力电池额定容量、额定电压、单体电池最高充电电压、最高允许充电电流、标称总能量、最高允许充电总电压、最高允许充电温度、电压需求、电流需求、充电模式等。然后勾选要仿真的充电过程,点击开始即可开始测试。
4)物理链路层可靠性测试:我们发现由于充电过程中伴随有强电磁场的干扰,对CAN总线通信的物理层有很大的影响,有被测设备因为没有具备良好的电磁兼容能力,而导致充电中断的现象。所以本测试认证加入了对物理链路层的可靠性测试
处在公共区域的事情,确实面临着太多的问题。其实一直以来GB/T对隐私的问题是没有任何考虑的,收集了很多的信息,缺乏保护;协议本身也是逐渐完善,好多问题没有考虑。如果故障发生,CAN能工作时还好,各种故障处理机制带来的安全性问题,也需要逐步完善。
急着赶路,都把事情干成,把产品做出来,但是里面有那么多的错误帧,有那么多的问题,上了车再去查既费力,而且问题是查不完的。不同系统之间的问题,你把各种Noise变量加进去,可以得到一个很复杂的P-图。问题是改不完,真要改的完,要系统设计干嘛呢,要工程细节设计干嘛呢,要失效分析干嘛呢?